|
|
|
|
|
LES DRONES AU VIETNAM
Acteurs méconnus de la guerre menée par les ÉtatsUnis
en Asie du Sud-Est, les équipages chargés de la mise
en auvre des drones effectuèrent un travail souvent pénible
et sans gloire. Mais ils recueillirent des renseignements importants
sur l'ennemi. Le dictionnaire Webster définit le mot drone de cette façon
: 1) abeille mâle dépourvue de dard et qui ne fournit
pas de miel; 2) celui qui profite du travail des autres (parasite);
3) avion sans pilote commandé par radio. Malgré le nom
peu glorieux qu'ils portèrent, les drones accomplirent un immense
travail en Asie du Sud Est, et ils rapportèrent des renseignements
précieux. Le programme concernant ces machines non pilotées
fit l'objet de telles controverses qu'il ne survécut que très
peu de temps après la fin du conflit vietnamien.
La première tentative visant à employer des avions
sans pilote eut lieu pendant la Première Guerre mondiale, avec
la torpille aérienne Kettering, plus connue sous le sobriquet
de « Bug ». L'idée d'un tel engin refit surface
à plusieurs reprises, mais elle ne se concrétisa guère.
En fin de compte, les drones connurent une certaine expansion avec
l'établissement de la Pilotless Aircraft Branch, qui s'occupa
des cibles aériennes non pilotées. La répugnance
de l'US Air Force vis-à-vis de tels appareils provenait du
fait que cette force aérienne se considérait avant tout
comme une armée de pilotes, et que des pilotes ne peuvent supporter
la cohabitation avec des avions dépourvus de pilote... La firme
Ryan Aeronautical mit des années à trouver un nom qui
convînt aux aviateurs pour ces machines volantes. Les termes
de drone, d'avion sans pilote et de radiocommande faisaient en effet
grincer des dents aux pilotes militaires américains, lesquels
commençaient à envisager sérieusement une carrière
civile. S'il ne fut pas totalement accepté par l'Air Force,
le concept d'avion non piloté n'en fut pas moins progressivement
toléré, et toutes les parties en présence s'accordèrent
sur le fait que la dénomination de RPV (Remotely Piloted Vehicle,
appareil piloté à distance) était celle qui pouvait
le mieux s'appliquer à ces étranges aéronefs. La perte d'un Lockheed U-2 au-dessus de Cuba et la disparition de plusieurs autres appareils du même type en Chine populaire au cours des années soixante convainquirent les responsables de l'US Air Force de la nécessité d'utiliser d'autres moyens, moins coûteux, pour surveiller le système de missiles soviétique constitué de SA-2 « Guideline ». Les besoins américains dans ce domaine se révélèrent si impérieux que le programme des drones fut réactivé. Dans le cadre des projets Lightning Blue et Compass Cookie, quelques Ryan Model 124 Firebee 1 furent modifiés afin de pouvoir être employés dans des missions de reconnaissance. Les différends avec le régime de Fidel Castro s'étant quelque peu apaisés avant la mise en service opérationnel de ces engins, les Firebee 1 furent expédiés à Kadena AB, dans l'île d'Okinawa, d'où ils furent utilisés pour assurer la couverture de la Chine et de la Corée du Nord peu de temps après l'incident du golfe du Tonkin (août 1964). Les choses avaient été faites avec tant de hâte que les Américains ne purent mettre en place qu'un seul ensemble de commandement, de poursuite et de contrôle radar. Les opérations de récupération ne purent donc être menées que par une équipe à la fois. T'ai-wan fut ensuite sélectionné comme base de toutes les sorties concernant la Chine du Sud. Mais aucune mission n'avait alors été commandée en direction du Viêt-nam. Moins de un mois après son installation à Kadena, l'équipe américaine spécialisée dans la mise en oeuvre des drones reçut l'ordre de rallier Biên Hoa, au Viêt-nam du Sud. Aucune infrastructure de soutien n'ayant été prévue, le détachement fut contraint de revenir à Okinawa huit jours seulement après son arrivée à Biên Hoa. Cependant, à la suite de consignes transmises par le Pentagone, des installations furent assez rapidement mises en place, et le groupe Fire Fly fut en mesure de revenir au Viêt-nam du Sud dès le mois d'octobre. Il allait entreprendre un travail remarquable, qui devait rester dans les annales.
Quelques C-130A avaient été modifiés afin de
pouvoir emporter sur leurs pylônes de voilure ce que l'US Air
Force nommait des SPA (Special-Purpose Aircraft, avions à vocation
spéciale). Ils furent rebaptisés GC-130, MC-130 ou DC-130A
et affectés dans un premier temps au 55th
AREFS, qui était composé d'équipages de
Boeing KC-97. Les appareils chargés du transport des drones
disposaient de deux pylônes sous chaque aile et étaient
capables de contrôler quatre de ces aéronefs à
la fois. Les versions de reconnaissance des RPV étant plus
volumineuses et plus lourdes, les DC-130 qui les mettaient en aeuvre
n'en emportaient qu'une sous chaque aile. Les pylônes étaient
implantés entre les moteurs, en lieu et place des réservoirs
de carburant auxiliaires des premières versions du Hercules.
Quand les C-130E furent transformés, les réservoirs
de carburant demeurèrent au même endroit, mais les pylônes
furent installés à l'extérieur des propulseurs.
L'arrivée de ces nouveaux appareils aux capacités et
à la fiabilité plus grandes permit aux équipages
qui volaient sur des C-130A fatigués d'améliorer la
rentabilité de leurs machines. Le DC-130 était équipé des systèmes nécessaires au lancement, à la poursuite et à la récupération des drones. Ces dispositifs consistaient en deux postes de lancement, d'où les équipements embarqués sur les engins sans pilote étaient activés et où ils étaient vérifiés. Les spécialistes affectés à ce travail pouvaient contrôler les moteurs des RPV puis les faire démarrer et, enfin, les amener au régime correspondant à la phase de largage. Un autre poste, situé en arrière de l'habitacle de pilotage et destiné à accueillir deux membres d'équipage, contenait les instruments de poursuite et de contrôle. Le drone pouvait être programmé en ce qui concernait son cap, sa vitesse, son altitude et la puissance de son propulseur. Les données de navigation et de poursuite étaient transmises à un calculateur qui indiquait les positions successives du DC-130 et du RPV sur une carte à grande échelle. Le plan de vol figurant sur cette carte, l'équipage était à même de repérer immédiatement toute modification de trajectoire. D'autres systèmes permettaient de suivre et d'enregistrer les images vidéo provenant d'avions sans pilote emportant une caméra de télévision. Les drones réservés aux missions spéciales pouvaient eux aussi transmettre des informations aux avions mères.
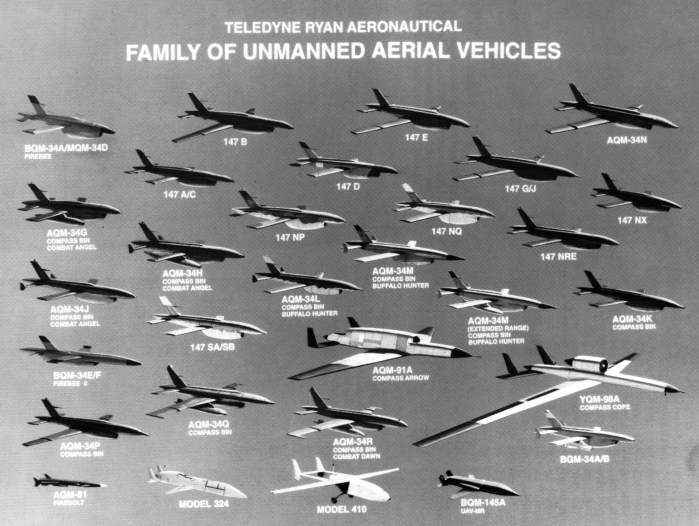
Remotely Piloted Vehicle Le Q-2C Firebee, dans ses versions aéroportée et terrestre,
avait été développé pour les missions
de reconnaissance sous la désignation de Model 147 ou AQM-34
(il reçut par la suite la dénomination constructeur
de Model 124 et celle de BQM-34A dans l'US Air Force). Sa taille fut
augmentée afin d'accroître son rayon d'action et sa charge
utile. Pour faciliter la pénétration à basse
altitude, l'envergure des ailes de cet engin fut amenée à
4,57 m et à 8,23 m un peu plus tard. Les appareils de ce type
employés à haute altitude eurent une envergure de 8,23
m et même de 9,75 m. La longueur, quant à elle, passa
de 7,92 à 9,14 m pour toutes les versions, à l'exception
de deux. La poussée du moteur, de 770 kg au départ,
fut amenée progressivement à 870 kg puis à 1270
kg, dans ce dernier cas pour les modèles spéciaux destinés
à la reconnaissance à haute altitude et à longue
distance. Quelques variantes furent dotées de réservoirs
supplémentaires placés sous les ailes.
Ces aéronefs étaient pourvus d'une vaste gamme d'équipements de navigation, dont des plates-formes inertielles, des Doppler, des LORAN, etc. Ils étaient également équipés de calculateurs peu sophistiqués capables de contrôler la vitesse, l'altitude, le cap, le régime des moteurs, les capteurs de bord et le système de récupération. Ils pouvaient mettre en marche les senseurs, arrêter leur fonctionnement, et diriger non seulement les virages, les montées et les piqués, mais aussi leur cadence. En fonction du caractère de certaines missions, un dispositif de brouillage portant l'appellation de Rivet Boundet pouvait être mis en place afin de leurrer le système de conduite de tir radar des missiles SA-2. Parmi les autres équipements emportés figuraient un appareillage pouvant supprimer les traînées de condensation (ce qui permettait d'éviter un repérage visuel), un autre (HIDE) diminuant la réflexion des ondes radar, un autre (HEMP) capable de détecter l'approche d'éventuels intercepteurs ennemis et d'élaborer des manoeuvres évasives afin d'échapper aux tirs de ces derniers, et un autre encore (HAT-RAC) adapté aux missions à haute altitude et capable de repérer les chasseurs ou les missiles sol-air de l'adversaire. Caméras spéciales Les capteurs emportés comprenaient une large gamme de caméras
fixes, mobiles ou capables d'effectuer des balayages d'horizon à
horizon, adaptées aux missions à haute ou à basse
altitude. Quelques-unes pouvaient fournir des images très précises
d'un objectif, et d'autres pouvaient couvrir de larges secteurs. Il
existait également des caméras de télévision,
équipées de zooms. Parmi les divers types de récepteurs électroniques
utilisés figuraient des systèmes destinés à
intercepter les signaux émis par l'ennemi, tels que ceux des
radars ou des chaînes de transmission de données. Ces
dispositifs permettaient de capter des informations envoyées
aux appareils en vol, aux stations terrestres ou aux satellites. Quelques-uns
pouvaient être manipulés par des opérateurs en
l'air ou au sol. Certains de ces appareils avaient une fonction purement
défensive dans le sens où ils pouvaient servir à
identifier une menace. Une fois celle-ci détectée, ils
avaient la possibilité d'émettre des signaux de brouillage
ou de commander une manoeuvre évasive. Enfin, les RPV comportaient des systèmes de récupération
reliés à des récepteurs, si bien que le plan
de vol était modifiable et que les avions sans pilote pouvaient
être guidés manuellement.
L'opération de récupération était programmée
dans le caculateur de vol à un moment preselectionné,
mais elle pouvait également être prise en main par le
DRO (Drone Recovery Officer, officier de récupération
des drones), qui se trouvait à terre. Normalement, le RPV était
pris dans le faisceau du radar ami lorsqu'il approchait du secteur
prévu pour sa récupération; là, il passait
sous le contrôle du DRO, qui s'occupait des corrections de dernière
minute, jusqu'au moment où l'engin sans pilote s'accrochait
au câble tendu par un hélicoptère. Les systèmes
de bord destinés à cette opération comportaient
des servomécanismes qui coupaient le moteur et des parachutes
qui freinaient la descente. L'équipage du DC-130 était composé d'un pilote, d'un copilote, d'un navigateur et d'un mécanicien navigant. Les missions de ces quatre hommes étaient identiques à celles que remplissaient ceux qui servaient à bord d'autres versions du Hercules. Dans la cabine se trouvaient deux LCO (Launch Control Officers, officiers chargés du lancement) et deux ARCO (Airborne Remote Control Officers, officiers chargés du guidage), tous quatre spécialisés dans la guerre électronique. Les LCO préparaient le plan de vol et programmaient chaque sortie, une tâche longue et fastidieuse puisque chaque mission se traduisait par de nombreuses modifications en matière de vitesse, d'altitude, de trajectoire et d'utilisation des capteurs. Chaque ordre donné au programme réclamait plusieurs étapes, et, lorsque la modification d'une donnée transmise initialement s'imposait, sept ou huit opérations étaient nécessaires. Un piqué ou un cabré demandait plusieurs modulations successives de la poussée du moteur. Peu avant l'envol, les LCO passaient en revue les divers systèmes du RPV et programmaient la mission en branchant des centaines de câbles, comme l'indiquaient les données figurant sur les feuilles qu'ils avaient préparées. Puis, à partir des postes qui leur étaient attribués dans le DC-130, ils vérifiaient tous les équipements. En l'air, ils s'assuraient que tout était au point, de façon à pouvoir répondre à l'ordre de lancement de façon immédiate. Si tout allait bien, ils le notifiaient au contrôle et attendaient le largage. A ce moment, ils lançaient le moteur à la puissance nécessaire et libéraient le drone. La mission commençait véritablement pour tous les membres de l'équipage, à l'exception des LCO, qui pouvaient dormir, manger ou lire. Les ARCO entraient à présent en action, suivant le RPV et surveillant sa trajectoire. Tant que l'avion sans pilote paraissait suivre le plan de vol préétabli, ils ne faisaient qu'attendre, mais, dès qu'un problème survenait, ils s'appliquaient à ramener le RPV dans sa trajectoire, à lui rendre sa vitesse ou à lui faire regagner l'altitude qu'il avait perdue. Dans certains cas, ils pouvaient même prendre la responsabilité d'annuler la mission et de contrôler manuellement le drone jusqu'à la zone de récupération.
L'équipe de récupération L'équipe de récupération se composait de l'équipage
d'un hélicoptère Sikorsky CH-3 ou CH-53, d'un DRO et
de plusieurs membres du personnel au sol. La méthode qui consistait
à récupérer un drone fut baptisée MARS
(Mid-Air Retrieval System). Presque toujours un pilote, le DRO était
chargé de ramener le drone à l'endroit précis
où celui-ci devait être accroché à l'hélicoptère.
L'équipage de ce dernier comprenait un pilote, un copilote
et un opérateur de treuil. Sa mission était d'intercepter
l'engin non piloté en l'air et de le déposer à
terre, où des équipes spécialisées prenaient
le relais. Les équipages de voilures tournantes s'acquittèrent
de cette tâche avec une rare efficacité, et ils ramenèrent
à bon port à de nombreuses reprises des drones de l'US
Navy et même des aviateurs abattus. Le bulletin d'information d'un squadron opérationnel donnait
la définition suivante du DRO : « Il s'agit d'un officier
de l'US Air Force qui n'a jamais établi un plan de vol et qui
n'a passé aucune visite pré-vol de son avion. Il n'est
jamais monté à son bord et n'en a jamais lancé
le moteur. Il n'a jamais levé le pouce en direction de son
chef mécanicien et n'a jamais roulé au sol dans son
appareil. Il n'a jamais pu entendre le bruit du moteur de sa machine
et n'en a jamais levé ni abaissé le train d'atterrissage.
Il n'a jamais regardé par la verrière de son avion.
Il n'est intervenu que lorsque se posait un problème. » Les RPV en opérations La mission de conduire les drones au combat revint au 4025th Reconnaissance Squadron (4080th SW), déployé à Biên Hoa à partir de 1964. N'ayant pas reçu l'autorisation de porter le nom de Black Knights, qui lui avait été attribué alors qu'elle volait sur Martin RB-57, cette unité adopta celui de Red Falcons. Elle devint 350th SRS le 11 février 1966, quand la dénomination de l'escadre à laquelle elle appartenait fut transformée en celle de 100th SRW et que ses U-2 furent transférés au 349th SRS. Les sorties conduites en Asie du Sud-Est reçurent les noms de code de Blue Springs, Bubble Bug, Buffalo Hunter, Litter Bug, Compass Cookie et Lightning Bug.
100th SRW - 4025th SRS Au départ, les DC-130 concernés par ces missions furent
basés à Biên Hoa, et les CH-3 chargés des
opérations de récupération, à Da Nang.
Ces deux aérodromes étaient constamment l'objet d'attaques
à la roquette et de harcèlements de la part des tireurs
d'élite du Viêtcong, mais ils ne subirent pas de dommages
majeurs avant le 31 janvier 1968. Ce jour-là, un raid massif
sur Biên Hoa coûta la vie à un membre d'une équipe
de maintenance et provoqua la destruction d'une grande partie de l'équipement
de soutien. En juillet 1970, la base de départ des DC-130 équipés
de drones et des U-2 devint U-Tapao, qui reçut l'appellation
d'Operating Locating RU (OL-RU). Le groupe MARS demeura, quant à
lui, à Da Nang jusqu'en novembre 1972, puis il s'installa à
Nakhon Phanom (NKP). Cette unité effectua sa première
mission le 20 août 1964 et la dernière le 30 avril 1975. Missions typiques Les drones furent engagés dans des missions très diverses,
mais les plus courantes consistèrent en des reconnaissances
optiques à basse altitude. Faisant appel à des caméras
classiques et à des caméras de télévision,
ces missions se déroulèrent toutes au-dessus des zones
de combat. Des RPV furent largués au-dessus du golfe du Tonkin,
du Viêt-nam du Sud, du Laos ou du Cambodge. Ils évoluaient
tout d'abord à basse altitude afin d'échapper aux missiles
sol-air et aux tirs des canons antiaériens de l'ennemi, puis
ils survolaient l'objectif à basse ou à haute altitude.
Chaque sortie concernait plusieurs objectifs, en moyenne sept, et
le drone passait de l'un à l'autre en employant la méthode
décrite précédemment. Une fois hors de portée
des missiles solair, il prenait de l'altitude pour regagner sa base. Les missions photographiques à haute altitude étaient conduites entre 12 000 et 20 000 m en fonction des objectifs et du type des capteurs emportés. Les vols de reconnaissance électronique étaient menés quant à eux à diverses altitudes. Il fallait que les équipages prennent garde aux missiles sol-air, et, lorsqu'ils évoluaient à basse altitude, qu'ils se trouvent suffisamment haut pour relayer des signaux aux autres appareils. Les sorties entreprises dans le cadre de l'opération Combat Dawn à partir d'Osan AB, e^ Corée du Sud, se déroulaient strictement à haute altitude. Après avoir lancé leurs drones, les avions engagés dans ces missions devaient grimper à plus de 19 000 m et commencer à orbiter. Au fur et à mesure que le poids de carburant emporté diminuait, les appareils gagnaient un peu plus d'altitude.
Les hélicoptères
attendent Au-dessus du secteur où devait s'effectuer la récupération,
un hélicoptère CH-3 était déjà
en l'air, attendant le drone. Le moteur de ce dernier était
coupé, et un petit parachute de freinage s'ouvrait au niveau
de l'empennage, faisant piquer l'avion sans pilote. A 4 500 m, le
parachute principal, d'un diamètre de 30 m, se déployait,
et le RPV descendait tout doucement vers le sol. L'hélicoptère
évoluait quant à lui à 3 500 m, son équipage
s'appliquant à repérer le parachute. Au-dessus de ce
dernier était attaché un autre parachute, de 7 m de
diamètre celui-là, qui constituait l'objectif de la
voilure tournante. Volant à 175 km/h, celle-ci accrochait le
petit parachute, ce qui libérait le plus grand. Le treuil du
CH-3 absorbait le choc et se déroulait jusqu'à ce que
la vitesse du drone atteigne celle de l'hélicoptère.
Le RPV était ensuite remonté jusqu'à une distance
de 5 m du CH-3. Le manuel traitant de cette opération stipulait
que « l'hélicoptère hissait le drone jusqu'à
lui ». En fait, les équipages soulignaient que, en raison
de la masse élevée du RPV et des conditions de température
propres à l'Asie du Sud-Est, c'était l'hélicoptère
qui perdait de l'altitude. L'engin sans pilote était ramené
à faible vitesse vers la zone de récupération,
où les films qu'il contenait étaient déchargés.
Puis il était embarqué à bord d'un DC-130 et
expédié vers sa base. Là, il était préparé
en vue de remplir une nouvelle mission. L'US Navy commença à s'intéresser aux drones à partir de 1969 dans le cadre du projet Belfry Express. Mais celui-ci ne devint véritablement opérationnel qu'un an plus tard. N'ayant pas de capacités équivalant à celles de l'Air Force, la marine fut contrainte de faire appel à cette dernière en ce qui concernait la récupération de ses engins ou de les repêcher en mer. Les CH-3 participèrent ainsi à une vingtaine de missions menées par la Navy. Des incidents se produisirent à diverses occasions entre marins et aviateurs. La première fois qu'ils appontèrent sur un porte-avions, ces hélicoptères reçurent l'inscription US NAVY à la peinture lavable. Par la suite, le pilote d'un des hélicoptères, déployant un drapeau sur le pont du bâtiment sur lequel il venait de poser son appareil, déclara : « Je proclame que cette île est la propriété de l'US Air Force. » Le programme conduit par l'US Navy obtint en fin de compte un succès mitigé.
Histoires de guerre Les épisodes liés à l'engagement des drones
en Asie du Sud-Est sont trop nombreux pour être tous rapportés
ici. L'évocation de quelques-uns d'entre eux peut donner cependant
une bonne idée d'ensemble de ces opérations. Il n'est
pas possible de se rendre compte à quel point le drone Ryan
147 était un excellent appareil si l'on n'a aucune idée
des conditions dans lesquelles se déroulait le retour d'engins
de ce type. Parfois, ces machines étaient récupérées
sérieusement endommagées, d'importants morceaux de fuselage
en moins, et recouvertes de végétation et de câbles.
Elles frôlaient souvent la cime des arbres ou emportaient des
câbles téléphoniques ou télégraphiques.
Parfois, des RPV étaient atteints à un point tel par
des obus que les spécialistes de l'US Air Force avaient coutume
de dire qu'il ne restait de l'appareil original que le seul numéro
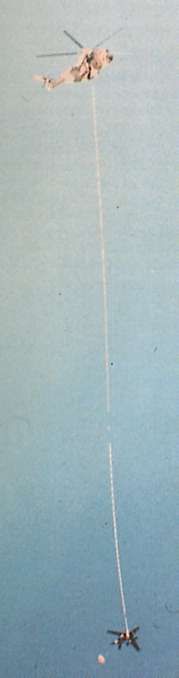
de série. Un CH-3E s'apprête à déposer sur la base de Da
Nang un drone de reconnaissance à basse altitude qu'il vient
de récupérer. Noter, à l'amère de l'hélicoptère,
les grappins qui servent à accrocher le parachute de petites
dimensions au moment de la récupération. L'une des missions les plus remarquables accomplies par les drones
de l'USAF fut l'envoi au-dessus du territoire ennemi d'un de ces engins
équipés d'un programmeur de vol qui permit de prendre
des photographies entre 5 et 60 m d'altitude. Le RPV regagna sa base
troué comme une passoire, mais avec des photographies d'excellente
qualité. Un autre avion sans pilote doté d'une caméra
de télévision dirigée vers l'avant effectua un
vol à très basse altitude et rapporta des films véritablement
extraordinaires : on put se rendre compte en les visionnant que le
drone était passé sous les lignes électriques
et à travers les arbres. Alors qu'il survolait l'aérodrome
de Kep, il s'était retrouvé face à face avec
un MiG-17 qui allait atterrir. La dernière image de cet épisode
fut l'appareil nord-vietnamien remplissant l'objectif, mais on ne
sut jamais comment les deux aéronefs avaient fait pour s'éviter. Les drones furent estimés responsables de la destruction d'au moins cinq MiG lors de la guerre du Viêt-nam. La première de ces étranges victoires intervint lors d'une mission au cours de laquelle un RPV était utilisé comme leurre. A court de carburant, l'engin sans pilote s'abîma en mer, et le chasseur adverse qui le poursuivait, manquant lui aussi de carburant, dut effectuer un amerrissage forcé. Un autre MiG fut descendu par des missiles sol-air nord-vietnamiens tirés contre un drone. A une autre occasion, l'un des MiG qui poursuivait un engin sans pilote américain fut abattu par erreur par son ailier. D'autres RPV conduisirent des MiG dans des zones où ces derniers tombèrent à court de carburant ou furent pris dans les tirs de leurs propres batteries de canons antiaériens.
Certains RPV furent détruits par des chasseurs de l'US Navy
en patrouille au-dessus du golfe du Tonkin. A une occasion, l'ARCO
d'un DC-130 qui ramenait manuellement un drone vers son appareil en
vue de le faire passer sous le contrôle du DRO de Da Nang eut
la surprise de voir quatre McDonnell Douglas F-4 de la Navy chargés
de la couverture du même DC-130 fondre sur l'engin sans pilote
et l'abattre. Les chasseurs qui escortaient les citernes volantes
Boeing RC-135 au-dessus du golfe du Tonkin revendiquèrent eux
aussi des victoires contre des MiG qui étaient en fait des
RPV. Chaque drone semblait avoir sa propre « personnalité
». C'étaient toujours les mêmes, parmi ces avions
sans pilote, qui déviaient de leur trajectoire, perdaient de
l'altitude ou grimpaient de manière inexplicable. Le drone
147 n° 28 avait, par exemple, une très grande attirance
pour l'eau : cinq de ses six premières missions s'achevèrent
en mer, malgré les efforts des ARCO chargés de le guider.
Ce RPV reçut en conséquence le nom de Super Stupid Waterbug.
A une occasion, il toucha la mer très loin de l'endroit où
le CH-3 de récupération orbitait. II fallut que l'équipage
de ce dernier emprunte un Huey pour repêcher l'engin. Cependant,
le Huey s'abîma presque immédiatement en mer, et les
huit hommes qu'il emportaient ne durent leur salut qu'aux débris
du drone auxquels ils parvinrent à s'accrocher. Grande fut
la surprise des équipages des avions de sauvetage de l'US Navy
envoyés sur les lieux de l'accident quand ils se rendirent
compte qu'un aussi grand nombre de personnes tenaient sur un si petit
aéroplane. L'opération Litter Bug s'inscrivit dans un programme de propagande
lancé en 1972, au cours duquel des drones du Tactical Air Command
destinés à l'origine au largage de paillettes furent
modifiés pour lancer des tracts. Ces engins effectuèrent
vingt-huit missions de ce type, trois d'entre eux ayant été
détruits par les défenses antiaériennes nord-vietnamiennes. Les équipages d'hélicoptères connurent, eux,
diverses aventures. La plus mémorable survint lors d'une opération
de récupération marquée par un vent qui soufflait
violemment. Le petit parachute que venait d'accrocher la voilure tournante
s'enroula autour du câble de remorquage et se prit dans la roulette
de nez du CH-3. Supportant tout le poids et toute la traînée
engendrée par le RPV, le nez de l'hélicoptère
se mit à piquer fortement. Tandis que l'aéronef perdait
rapidement de l'altitude, l'équipage s'appliquait à
l'alléger dans toute la mesure du possible en se débarrassant
du carburant et en entreprenant à plusieurs reprises des manoeuvres
figurant dans le manuel. Finalement, la voilure tournante regagna
sa base à la vitesse de 55 km/h. Cet incident amena les autorités
à demander le montage d'une protection au-dessus de la roulette
de nez. Un RPV fut transformé en plate-forme de contremesures électroniques défensives avec l'installation d'un système portant la dénomination d'ALQ-51 Shoehorn, destiné à leurrer les radars des missiles sol-air nordvietnamiens. L'engin sans pilote fut engagé en opérations et parvint à tromper une dizaine de missiles ennemis avant d'être détruit.
Un bilan positif Les AQM-34 du 100th SRW obtinrent de
remarquables résultats en Asie du Sud-Est, et ils ramenèrent
des informations nombreuses et importantes pour la conduite de la
guerre menée dans cette partie du monde par les ÉtatsUnis.
Au début du conflit, les Américains estimaient que,
face aux défenses assez peu étoffées des Nord
Vietnamiens, leurs drones auraient une durée de vie opérationnelle
moyenne de 2,5 missions. Entre les mains des équipages du 100th
SRW, cette moyenne fut de 7,5, ce qui est remarquable puisque
l'ennemi renforça sans arrêt ses moyens de défense
antiérienne. Les engins sans pilote de l'US Air Force subirent
des pertes dues aux avions et aux défenses antiaériennes
amies; certains s'abîmèrent immédiatement en mer
ou s'écrasèrent au sol aussitôt après avoir
été largués par leurs avions mères DC-130;
d'autres furent abattus par le feu de l'adversaire. Le 100th SRW utilisa
vingt-deux versions de RPV différentes au Viêt-nam, et
elle enregistra la destruction de 578 de ces appareils : 251 confirmés,
80 pour des raisons inconnues, 53 au cours de la phase de récupération,
et les autres pour des raisons variées. Les équipages
de CH-53 et de CH-3 réussirent 2 655 des 2 745 tentatives de
récupération qu'ils menèrent, soit un taux de
succès de 96,7 %. L'appareil qui enregistra la plus grande réussite fut un drone
de reconnaissance photographique à basse altitude surnommé
« Tomcat ». Cet engin mena soixante-huit missions avant
d'être détruit; il fut suivi par « Budweiser »
(63), « Ryan's Daughter » (52) et « Baby Buck »
(46). |
![]()
Sources :
Avions de guerre numéro 48 ; le combat aérien aujourd'hui : Editions Atlas 1988
<<< Chapitre précédent
 Chapitre suivant >>>
Chapitre suivant >>>
![]()